Halt, Quasihalt, Recur
The goal of the Busy Beaver contest is to find n-state k-color Turing machine programs that run for as long as possible before halting. It’s basically an optimization problem: what is the longest finite computation that can squeezed out of a program of a certain length? Or from the flip-side: how much description can be packed into a program of a certain length?
In the early days of the Busy Beaver game, people tried to win with programs they had written themselves, by hand. In 1964 Milton Green devised a method for iteratively constructing longer Turing machine programs from shorter ones. Here’s a diagram with no context:
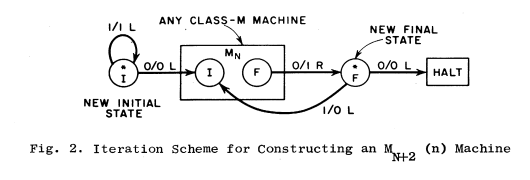
The details don’t matter. The Green method is computable and the Busy Beaver sequence is not, so it’s clear that the programs thereby produced cannot be optimal, except perhaps among short programs. But it was soon realized that Busy Beaver “champion” programs are too clever to be written, and that therefore the best way to find long-running programs is to search for them. Although they deal with programs, Busy Beaver searchers are more like gold prospectors than they are like programmers.
Still, imagine for a moment that you are a Turing machine programmer and that you’re trying to win the Busy Beaver contest with a handmade program. You have n states and k colors to work with, and so nk print/shift/transition instructions to specify. Where do you start?
The zeroth step, as any good programmer knows, is to review the requirements. In this case, the only constraint on eligibility for a contest entrant program is that it halt. Your program therefore must contain at least one halt transition,1 because a Turing machine only halts when explicitly instructed.2 But this means that you don’t really have nk instructions at your disposal; you only have nk - 1.
This is an annoyance. Other instructions can be looped over and executed many times each, but the halt instruction can executed only once. It doesn’t carry its weight and it bloats the program. Wouldn’t it be nice if you didn’t have to worry about halting? Wouldn’t it be nice to work with a full set of nk instructions? Why does a program need to halt anyway?
From the perspective of a Busy Beaver programmer, the purpose of halting is to signal the end of the computation. The goal is to come up with the longest possible finite computation given a fixed amount of program length, and some specific endpoint for the computation is required, and halting is that endpoint. What other kinds of termination conditions could be used, and what kinds of computations would they yield?
Here’s one way to generalize halting. When a Turing machine halts, all of its states become unreachable. Instead of arranging for all states to become unreachable, a programmer could arrange for some of the machine’s states to become unreachable. The machine wouldn’t actually halt, but it would enter into some kind of degenerate condition, and this would signal the end of the computation. Such a machine is said to have quasihalted, and the use of quasihalting as a termination condition leads to the Beeping Busy Beaver sequence.
Let’s look at some 3-state 2-color (❸②) examples.
The ❸② halting champion program is 1RB 1RH 1LB 0RC 1LC 1LA,3 and it halts after 21 steps. Here is its tape evolution, the longest computation that can be executed by a ❸② program if halting is used as the termination condition:
0 A __________[_]_________
1 B __________#[_]________
2 B __________[#]#________
3 C ___________[#]________
4 A __________[_]#________
5 B __________#[#]________
6 C __________#_[_]_______
7 C __________#[_]#_______
8 C __________[#]##_______
9 A _________[_]###_______
10 B _________#[#]##_______
11 C _________#_[#]#_______
12 A _________#[_]##_______
13 B _________##[#]#_______
14 C _________##_[#]_______
15 A _________##[_]#_______
16 B _________###[#]_______
17 C _________###_[_]______
18 C _________###[_]#______
19 C _________##[#]##______
20 A _________#[#]###______
21 H _________##[#]##______The ❸② quasihalting champion program is 1RB 0LB 1LA 0RC 1LC 1LA, and it quasihalts after 55 steps. Here is its tape evolution over 60 steps:
0 A __________[_]_________
1 B __________#[_]________
2 A __________[#]#________
3 B _________[_]_#________
4 A ________[_]#_#________
5 B ________#[#]_#________
6 C ________#_[_]#________
7 C ________#[_]##________
8 C ________[#]###________
9 A _______[_]####________
10 B _______#[#]###________
11 C _______#_[#]##________
12 A _______#[_]###________
13 B _______##[#]##________
14 C _______##_[#]#________
15 A _______##[_]##________
16 B _______###[#]#________
17 C _______###_[#]________
18 A _______###[_]#________
19 B _______####[#]________
20 C _______####_[_]_______
21 C _______####[_]#_______
22 C _______###[#]##_______
23 A _______##[#]###_______
24 B _______#[#]_###_______
25 C _______#_[_]###_______
26 C _______#[_]####_______
27 C _______[#]#####_______
28 A ______[_]######_______
29 B ______#[#]#####_______
30 C ______#_[#]####_______
31 A ______#[_]#####_______
32 B ______##[#]####_______
33 C ______##_[#]###_______
34 A ______##[_]####_______
35 B ______###[#]###_______
36 C ______###_[#]##_______
37 A ______###[_]###_______
38 B ______####[#]##_______
39 C ______####_[#]#_______
40 A ______####[_]##_______
41 B ______#####[#]#_______
42 C ______#####_[#]_______
43 A ______#####[_]#_______
44 B ______######[#]_______
45 C ______######_[_]______
46 C ______######[_]#______
47 C ______#####[#]##______
48 A ______####[#]###______
49 B ______###[#]_###______
50 C ______###_[_]###______
51 C ______###[_]####______
52 C ______##[#]#####______
53 A ______#[#]######______
54 B ______[#]_######______
55 C _______[_]######______ <-- States A and B become unreachable
56 C ______[_]#######______
57 C _____[_]########______
58 C ____[_]#########______
59 C ___[_]##########______
60 C __[_]###########______At step 55, the machine is in state C and scanning a blank at the left edge of the tape. The program gives the instruction C1 -> 1LC, so it will remain in C forever and so the machine has quasihalted.
That program is halt-free and so will obviously never halt. Nevertheless, something happens in those first 55 steps that is different from what comes after. That “something” can be regarded as a finite computation embedded as a markedly distinct initial segment in an otherwise infinite computation.
The use of quasihalting as a termination condition clearly increases the expressivity of the Turing machine language, since longer finite computations can be captured by the same descriptive resources. For the Turing machine programmer, this is great. More expressivity means shorter programs, and shorter programs are preferable to longer ones.
But now forget about being a Turing machine programmer and imagine yourself to be the implementor of a Turing machine simulator. Rather than making Turing machine programs, you make the thing that executes such programs. Your users are programmers, and they are increasingly vociferous in their demands that you implement quasihalting as a termination condition. That is, they want the simulator to stop running when their programs quasihalt.
In a schematic sense, this should be an easy feature to add. Here is the basic simulator loop logic:
while (1) {
if (IS_HALTED) {
break;
}
PRINT;
SHIFT;
TRANSITION;
}Here is the same loop with an added quasihalting check:
while (1) {
if (IS_HALTED || IS_QUASIHALTED) { // <-- added quasihalting check
break;
}
PRINT;
SHIFT;
TRANSITION;
}It looks like it should be easy to do this, but there’s a catch. Recall that the halt-ing problem asks whether an arbitrary machine will eventually halt. Of course, that problem is undecidable. Now consider the halt-ed problem, which asks whether a machine is currently halted. This question is trivial to answer; it’s implementation-specific, but it amounts to checking the machine’s current state and seeing if it’s the halt state. Every Turing machine simulator in effect solves the halted problem on every machine cycle.
Corresponding to these are the quasihalting problem and the quasihalted problem. The quasihalting problem is super-undecidable, and cannot be solved even with an oracle for the halting problem. The bad news is that quasihalted problem is equivalent to the halting problem; to ask a simulator to implement quasihalting detection in general is in effect to ask it to solve the halting problem on every machine cycle! So if you are a simulator-implementor and your programmer-users are demanding this feature, you definitely will not be able to deliver it. It’s logically impossible.
Suppose that you’ve explained this situation to the users of your simulator, and they still demand more expressivity – that is, they want to extend the longest finite computation that can be expressed within a program of some length. The crux of the issue seems to be the termination predicate. Quasihaltedness is wildly extravagant because of its uncomputability, but logically any computable predicate could be used.
As it happens, the Lin-Rado proof that BB(3) = 21 furnishes a nice computable predicate, which I call Lin-Rado recurrence (or just “recurrence” for short). I won’t describe it in detail here; see “The Lin-Rado Busy Beaver Proof” for a full description. A machine that has entered into recurrence will repeat a certain simple pattern over a fixed (possibly moving) span of tape forever. The pattern will have a certain period, which is the number of steps that it takes to execute the pattern before repeating.
Recurrence patterns are generally “stupid”, so we can plausibly regard entry into recurrence as a termination condition. This termination condition gives rise to yet another Busy Beaver-like sequence: BBLR(n, k) is the longest an n-state k-color Turing machine can run before entering into recurrence.
The BBLR(3, 2) champion program is 1RB 1LB 0RC 0LA 1LC 0LA. It runs for 101 steps before it enters into a recurrence of 24 steps. Here is its tape evolution over 150 steps:
0 A _______________[_]______________
1 B _______________#[_]_____________
2 C _______________#_[_]____________
3 C _______________#[_]#____________
4 C _______________[#]##____________
5 A ______________[_]_##____________
6 B ______________#[_]##____________
7 C ______________#_[#]#____________
8 A ______________#[_]_#____________
9 B ______________##[_]#____________
10 C ______________##_[#]____________
11 A ______________##[_]_____________
12 B ______________###[_]____________
13 C ______________###_[_]___________
14 C ______________###[_]#___________
15 C ______________##[#]##___________
16 A ______________#[#]_##___________
17 B ______________[#]#_##___________
18 A _____________[_]_#_##___________
19 B _____________#[_]#_##___________
20 C _____________#_[#]_##___________
21 A _____________#[_]__##___________
22 B _____________##[_]_##___________
23 C _____________##_[_]##___________
24 C _____________##[_]###___________
25 C _____________#[#]####___________
26 A _____________[#]_####___________
27 B ____________[_]#_####___________
28 C _____________[#]_####___________
29 A ____________[_]__####___________
30 B ____________#[_]_####___________
31 C ____________#_[_]####___________
32 C ____________#[_]#####___________
33 C ____________[#]######___________
34 A ___________[_]_######___________
35 B ___________#[_]######___________
36 C ___________#_[#]#####___________
37 A ___________#[_]_#####___________
38 B ___________##[_]#####___________
39 C ___________##_[#]####___________
40 A ___________##[_]_####___________
41 B ___________###[_]####___________
42 C ___________###_[#]###___________
43 A ___________###[_]_###___________
44 B ___________####[_]###___________
45 C ___________####_[#]##___________
46 A ___________####[_]_##___________
47 B ___________#####[_]##___________
48 C ___________#####_[#]#___________
49 A ___________#####[_]_#___________
50 B ___________######[_]#___________
51 C ___________######_[#]___________
52 A ___________######[_]____________
53 B ___________#######[_]___________
54 C ___________#######_[_]__________
55 C ___________#######[_]#__________
56 C ___________######[#]##__________
57 A ___________#####[#]_##__________
58 B ___________####[#]#_##__________
59 A ___________###[#]_#_##__________
60 B ___________##[#]#_#_##__________
61 A ___________#[#]_#_#_##__________
62 B ___________[#]#_#_#_##__________
63 A __________[_]_#_#_#_##__________
64 B __________#[_]#_#_#_##__________
65 C __________#_[#]_#_#_##__________
66 A __________#[_]__#_#_##__________
67 B __________##[_]_#_#_##__________
68 C __________##_[_]#_#_##__________
69 C __________##[_]##_#_##__________
70 C __________#[#]###_#_##__________
71 A __________[#]_###_#_##__________
72 B _________[_]#_###_#_##__________
73 C __________[#]_###_#_##__________
74 A _________[_]__###_#_##__________
75 B _________#[_]_###_#_##__________
76 C _________#_[_]###_#_##__________
77 C _________#[_]####_#_##__________
78 C _________[#]#####_#_##__________
79 A ________[_]_#####_#_##__________
80 B ________#[_]#####_#_##__________
81 C ________#_[#]####_#_##__________
82 A ________#[_]_####_#_##__________
83 B ________##[_]####_#_##__________
84 C ________##_[#]###_#_##__________
85 A ________##[_]_###_#_##__________
86 B ________###[_]###_#_##__________
87 C ________###_[#]##_#_##__________
88 A ________###[_]_##_#_##__________
89 B ________####[_]##_#_##__________
90 C ________####_[#]#_#_##__________
91 A ________####[_]_#_#_##__________
92 B ________#####[_]#_#_##__________
93 C ________#####_[#]_#_##__________
94 A ________#####[_]__#_##__________
95 B ________######[_]_#_##__________
96 C ________######_[_]#_##__________
97 C ________######[_]##_##__________
98 C ________#####[#]###_##__________
99 A ________####[#]_###_##__________
100 B ________###[#]#_###_##__________
101 A ________##[#]_#_###_##__________ <-- first recurrence starts
102 B ________#[#]#_#_###_##__________
103 A ________[#]_#_#_###_##__________
104 B _______[_]#_#_#_###_##__________
105 C ________[#]_#_#_###_##__________
106 A _______[_]__#_#_###_##__________
107 B _______#[_]_#_#_###_##__________
108 C _______#_[_]#_#_###_##__________
109 C _______#[_]##_#_###_##__________
110 C _______[#]###_#_###_##__________
111 A ______[_]_###_#_###_##__________
112 B ______#[_]###_#_###_##__________
113 C ______#_[#]##_#_###_##__________
114 A ______#[_]_##_#_###_##__________
115 B ______##[_]##_#_###_##__________
116 C ______##_[#]#_#_###_##__________
117 A ______##[_]_#_#_###_##__________
118 B ______###[_]#_#_###_##__________
119 C ______###_[#]_#_###_##__________
120 A ______###[_]__#_###_##__________
121 B ______####[_]_#_###_##__________
122 C ______####_[_]#_###_##__________
123 C ______####[_]##_###_##__________
124 C ______###[#]###_###_##__________
125 A ______##[#]_###_###_##__________ <-- second recurrence starts
126 B ______#[#]#_###_###_##__________
127 A ______[#]_#_###_###_##__________
128 B _____[_]#_#_###_###_##__________
129 C ______[#]_#_###_###_##__________
130 A _____[_]__#_###_###_##__________
131 B _____#[_]_#_###_###_##__________
132 C _____#_[_]#_###_###_##__________
133 C _____#[_]##_###_###_##__________
134 C _____[#]###_###_###_##__________
135 A ____[_]_###_###_###_##__________
136 B ____#[_]###_###_###_##__________
137 C ____#_[#]##_###_###_##__________
138 A ____#[_]_##_###_###_##__________
139 B ____##[_]##_###_###_##__________
140 C ____##_[#]#_###_###_##__________
141 A ____##[_]_#_###_###_##__________
142 B ____###[_]#_###_###_##__________
143 C ____###_[#]_###_###_##__________
144 A ____###[_]__###_###_##__________
145 B ____####[_]_###_###_##__________
146 C ____####_[_]###_###_##__________
147 C ____####[_]####_###_##__________
148 C ____###[#]#####_###_##__________
149 A ____##[#]_#####_###_##__________ <-- third recurrence starts
150 B ____#[#]#_#####_###_##__________Here are the three sequences corresponding to three termination predicates:
| Sequence | Predicate |
|---|---|
| BB | Haltedness |
| BBB | Quasihaltedness |
| BBLR | LR-recurrence |
Haltedness and LR-recurrence are decidable predicates, while quasihaltedness is not. This implies with certainty that for all sufficiently large values, BBB dominates both BB and BBLR. It also seems likely that BBLR dominates BB for sufficiently large values, since LR-recurrence is a looser termination condition than haltedness.
Here are some concrete early values for these sequences, along with witnessing programs and proof statuses and discoverer. ! indicates known proved values, ? indicates lower bounds that are not known to be optimal, and $ indicates bounds that I believe I have proven with a reasonable degree of certainty (proofs to be published soon!).
| Value | Proved | Program | Discoverer | |
|---|---|---|---|---|
| BB(2, 2) | 6 | ! | 1RB 1LB 1LA 1RH |
Rado |
| BBB(2, 2) | 6 | ! | [same as for BB(2, 2)] | |
| BBLR(2, 2) | 9 | $ | 1RB 0LB 1LA 0RB |
Drozd |
| BB(3, 2) | 21 | ! | 1RB 1RH 1LB 0RC 1LC 1LA |
Lin |
| BBB(3, 2) | 55 | $ | 1RB 0LB 1LA 0RC 1LC 1LA |
Aaronson |
| BBLR(3, 2) | 101 | $ | 1RB 1LB 0RC 0LA 1LC 0LA |
Drozd |
| BB(2, 3) | 38 | ! | 1RB 2LB 1RH 2LA 2RB 1LB |
Brady |
| BBB(2, 3) | 59 | $ | 1RB 2LB 1LA 2LB 2RA 0RA |
Drozd |
| BBLR(2, 3) | 165 | ? | 1RB 0LA ... 1LB 2LA 0RB |
Drozd |
| BB(4, 2) | 107 | ! | 1RB 1LB 1LA 0LC 1RH 1LD 1RD 0RA |
Brady |
| BBB(4, 2) | 66349 | ? | 1RB 0LC 1LD 0LA 1RC 1RD 1LA 0LD |
Drozd |
| BBLR(4, 2) | 66349 | ? | [same as for BBB(4, 2)] |
A few trends stick out from this data. First, BBB(2, 2) = BB(2, 2) = 6, so the power of quasihaltedness doesn’t kick in immediately. But BBLR(2, 2) = 9, and indeed BBLR(3, 2) > BBB(3, 2) > BB(3, 2) and BBLR(2, 3) > BBB(2, 3) > BB(2, 3), so recurrence is a more powerful predicate than quasihaltedness for short programs. BBLR(4, 2) = BBB(4, 2) as far as is known, but I don’t have great confidence in this result. BBB will eventually dominate BBLR; why shouldn’t it happen at ❹②? All known quasihalting programs are also LR-recurrent, even though this cannot be true in general. It’s hard to say anything definitive about the ❹② case. As always, more searching is needed.
Open Problems
- Find better values for BBB(4, 2) and BBLR(4, 2), or else prove that the known lower bounds are optimal.
- Devise new termination conditions (either weaker or stronger than the conditions described here) and find champions for their corresponding Busy Beaver-like sequences.
- The Lin-Rado algorithm detects LR-recurrence, but it doesn’t do so until after the machine as finished its first recurrence. Devise an algorithm to detect recurrence at the time that it starts.
- Prove that BBLR dominates BB.
- Find a quasihalting program that is not LR-recurrent.
Footnotes
1 To maximize runtime, you will probably also want at most one halt transition; any more than that would be a waste.
2 This is in contrast to a computing regime like the lambda calculus, where halting is implied by program evaluation. It’s not obvious how to adapt the discussion in this post to such a model.
3 For program notation, see “Turing Machine Notation and Normal Form”.